The DAVOS real-time scheduling project aims to realize a full-stack autonomous driving system that meets the real-time requirements of autonomous driving. The project consists of three main components:
 Redefining Real-Time Requirements for Autonomous Driving Systems: We delve into the specific real-time requirements of autonomous driving systems. By modeling autonomous driving systems and introducing new evaluation metrics, we refine the traditional real-time requirements for such systems.
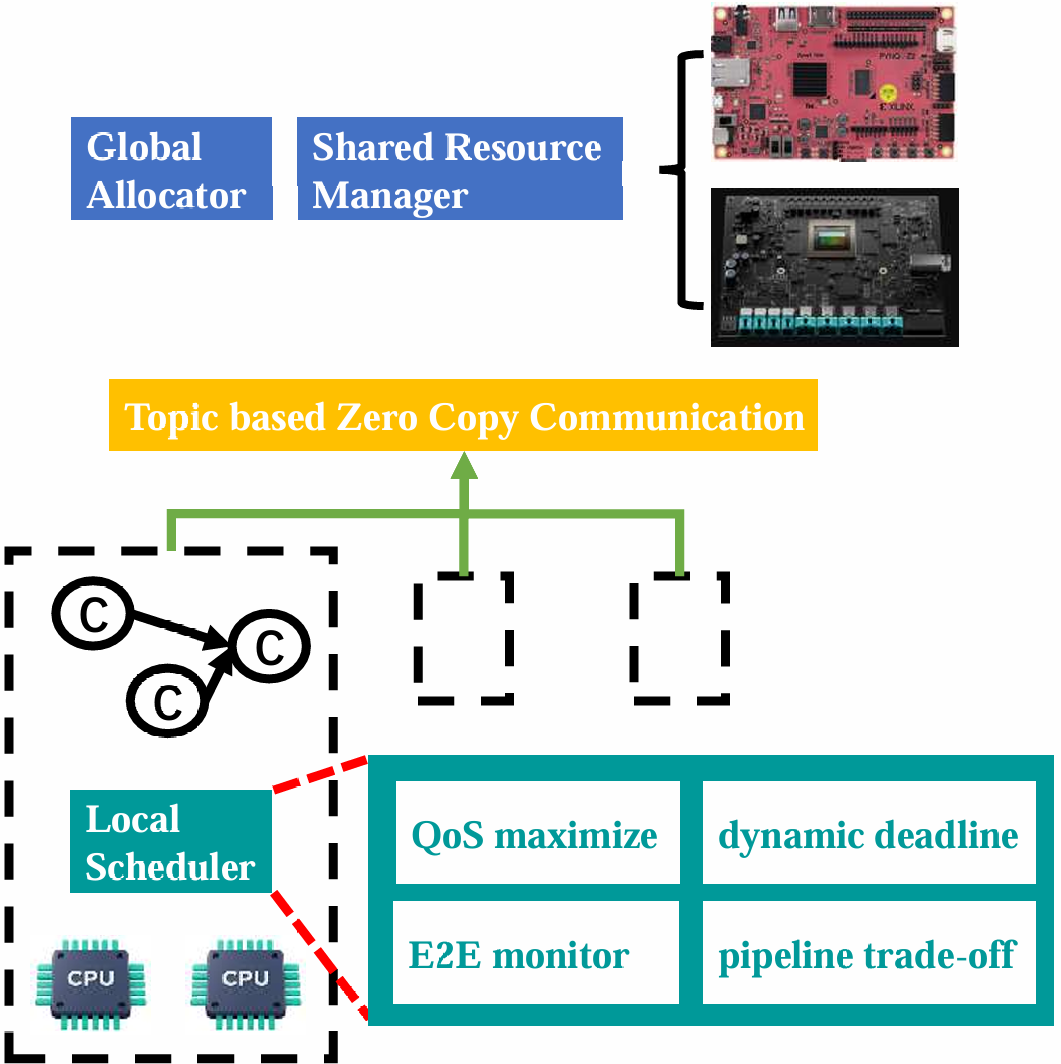
Real-Time ROS Middleware: Guided by the theoretical work in the first component, we have undertaken real-time modifications to the existing ROS middleware. We define new scheduling units and implement multi-level scheduling to address the problem of excessively large scheduling sets in global schedulers.
End-to-End Real-Time Compensation Mechanism: Within scheduling units, we have designed and implemented an end-to-end real-time compensation mechanism. This mechanism comprehensively considers algorithm quality, communication quality, and actual requirements to achieve end-to-end real-time guarantees by dynamically adjusting resource allocation and application objectives.
Redefining Real-Time Requirements for Autonomous Driving Systems: We delve into the specific real-time requirements of autonomous driving systems. By modeling autonomous driving systems and introducing new evaluation metrics, we refine the traditional real-time requirements for such systems.
Real-Time ROS Middleware: Guided by the theoretical work in the first component, we have undertaken real-time modifications to the existing ROS middleware. We define new scheduling units and implement multi-level scheduling to address the problem of excessively large scheduling sets in global schedulers.
End-to-End Real-Time Compensation Mechanism: Within scheduling units, we have designed and implemented an end-to-end real-time compensation mechanism. This mechanism comprehensively considers algorithm quality, communication quality, and actual requirements to achieve end-to-end real-time guarantees by dynamically adjusting resource allocation and application objectives.
